Magnetic Microrobots
We are developing robots at the millimeter and micrometer scale for use in surgery and on-chip devices. These tools are untethered and actuated remotely using magnetic fields and forces. They are capable of accessing small, constrained environments and performing previously infeasible tasks because of increased dexterity and precision.
Automated Fabrication Techniques
We are building a 3D SLA based printer for automated fabrication of soft magnetic microrobots. A fully automated workflow that translates robot simulations into an instruction set for a stereolithography 3D printer is developed. In this process, a rotating permanent magnet is used to program 3D magnetizations by reorienting hard magnetic particles within a photosensitive resin.
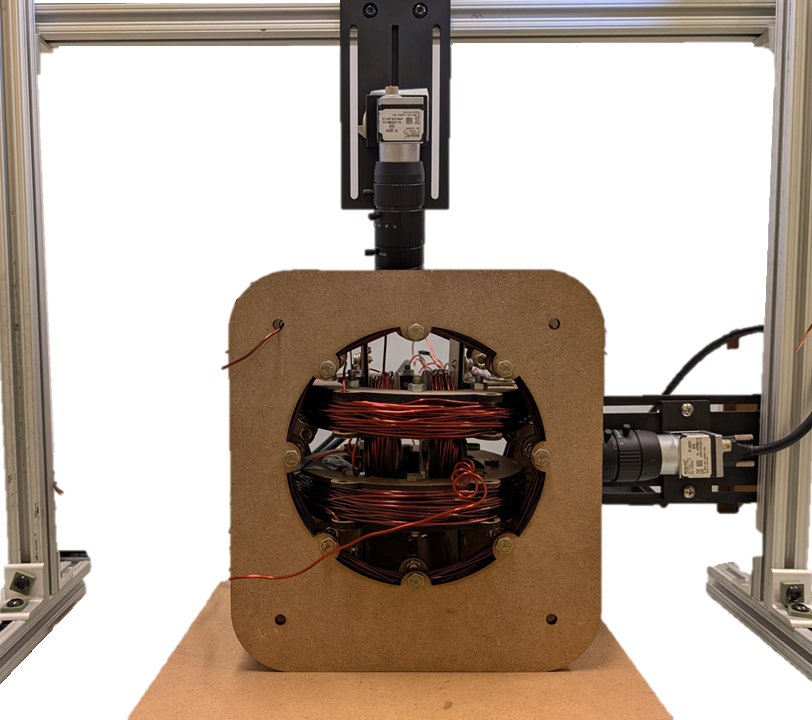
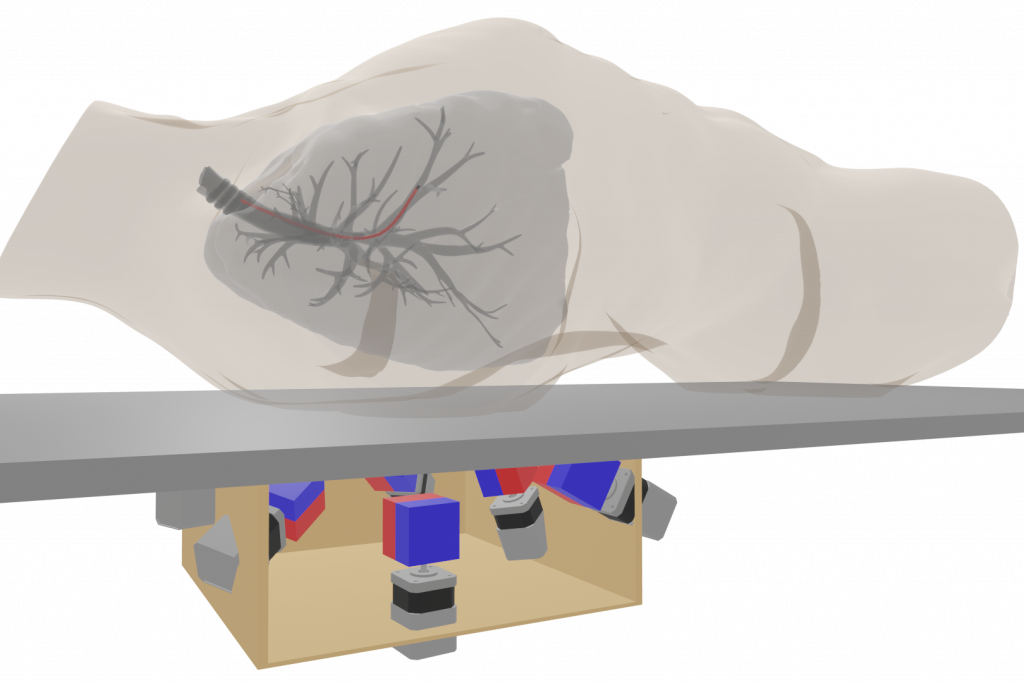
Magnetic Guidance Platforms
We are developing smart platforms that are able to generate multiple magnetic degrees-of-freedom for control and actuation of our robots. We are using electromagnetic coils and large external permanent magnets to achieve this.
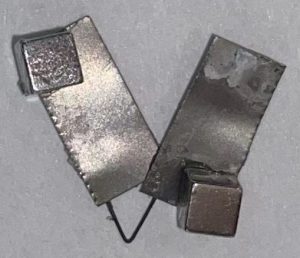
Clinical Applications
We developed a novel magnetically actuated capsule with a spring-magnet mechanism designed for drug delivery, microbiome sampling, and cargo transport. The capsule is remotely actuated using external magnetic fields. It can be ingested orally, activated at a target location, and expelled naturally.